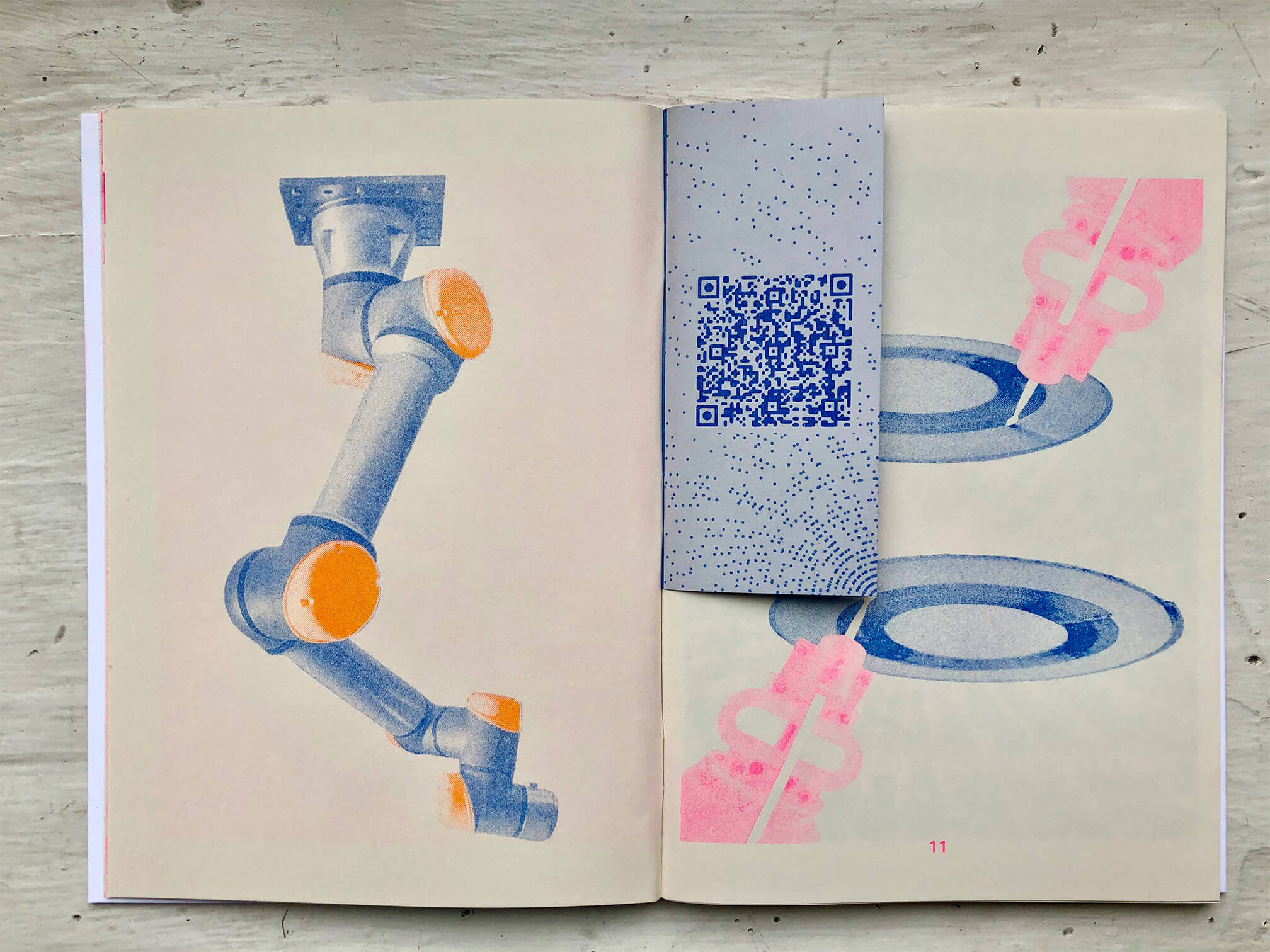
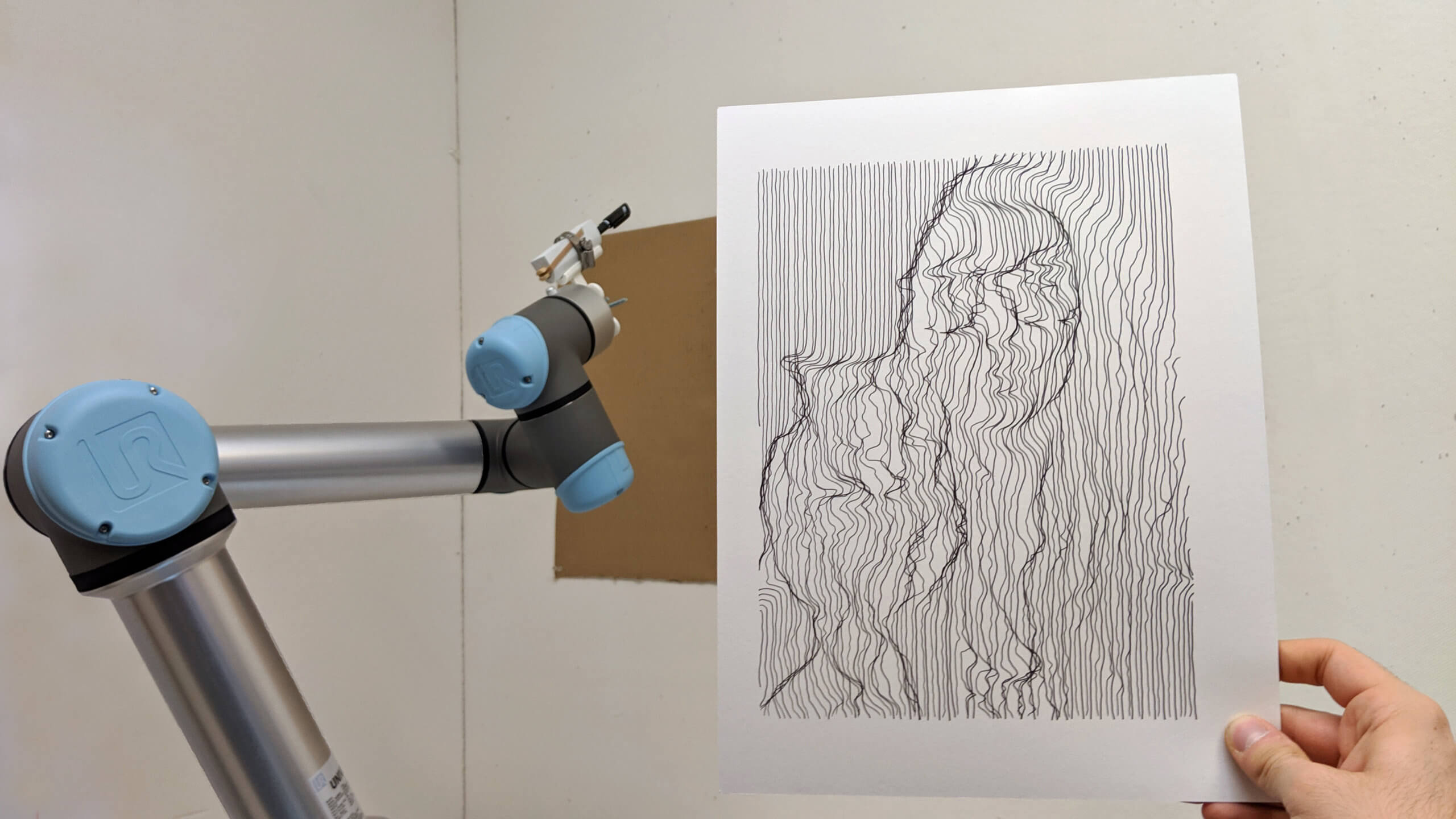
Robotic Tooling
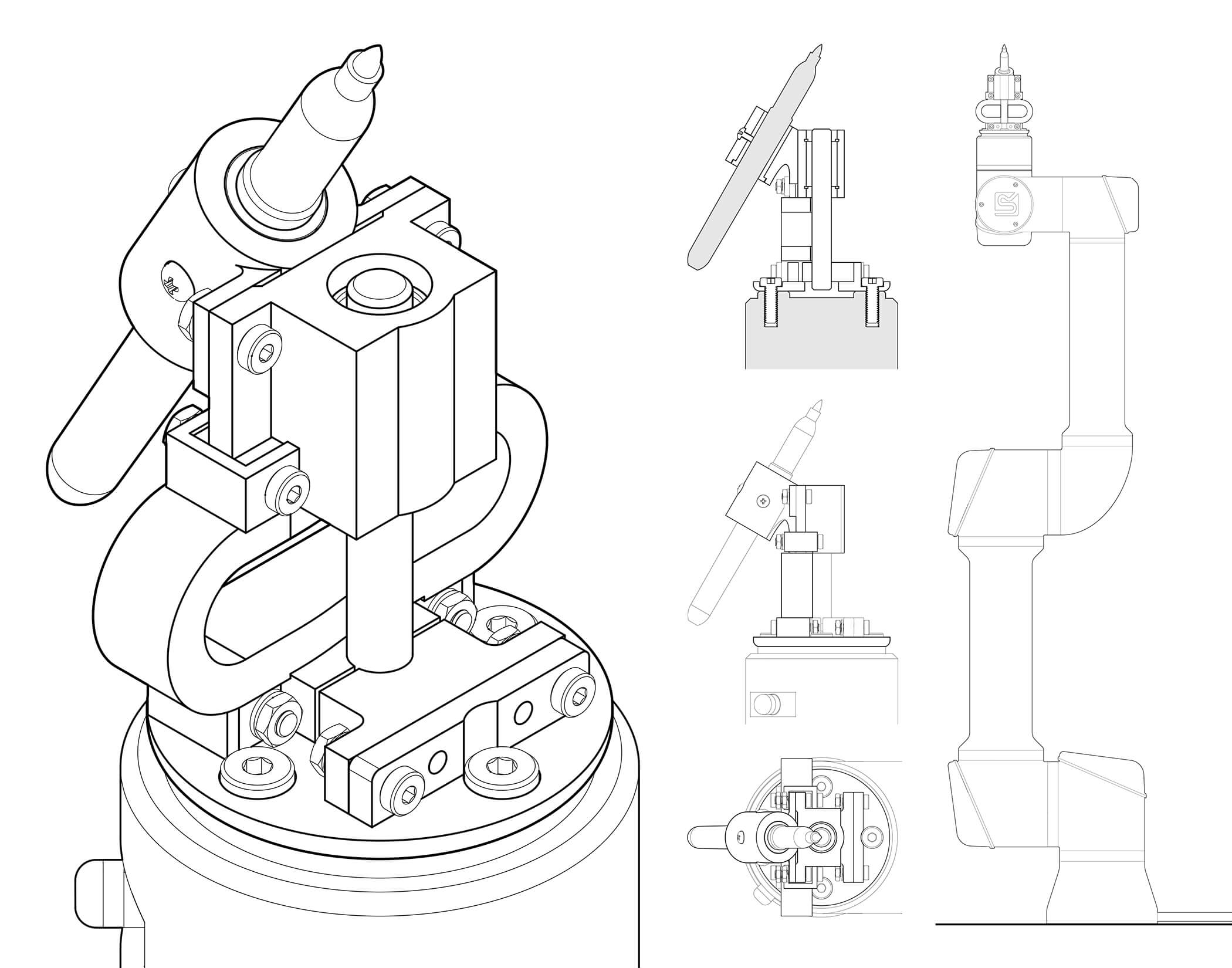
A selection of projects produced with the Universal Robots 5e [Urie]. 3D printed tool holders were iteratively designed to provide a connection from the brush/pen to the tool flange. Clear resin attaches to the linear sleeve bearing and elastic resin provides slight flexible movement on the linear motion shaft. A combination of Rhinoceros, RoboDK, and the robot pendant were used to interface with the robot.

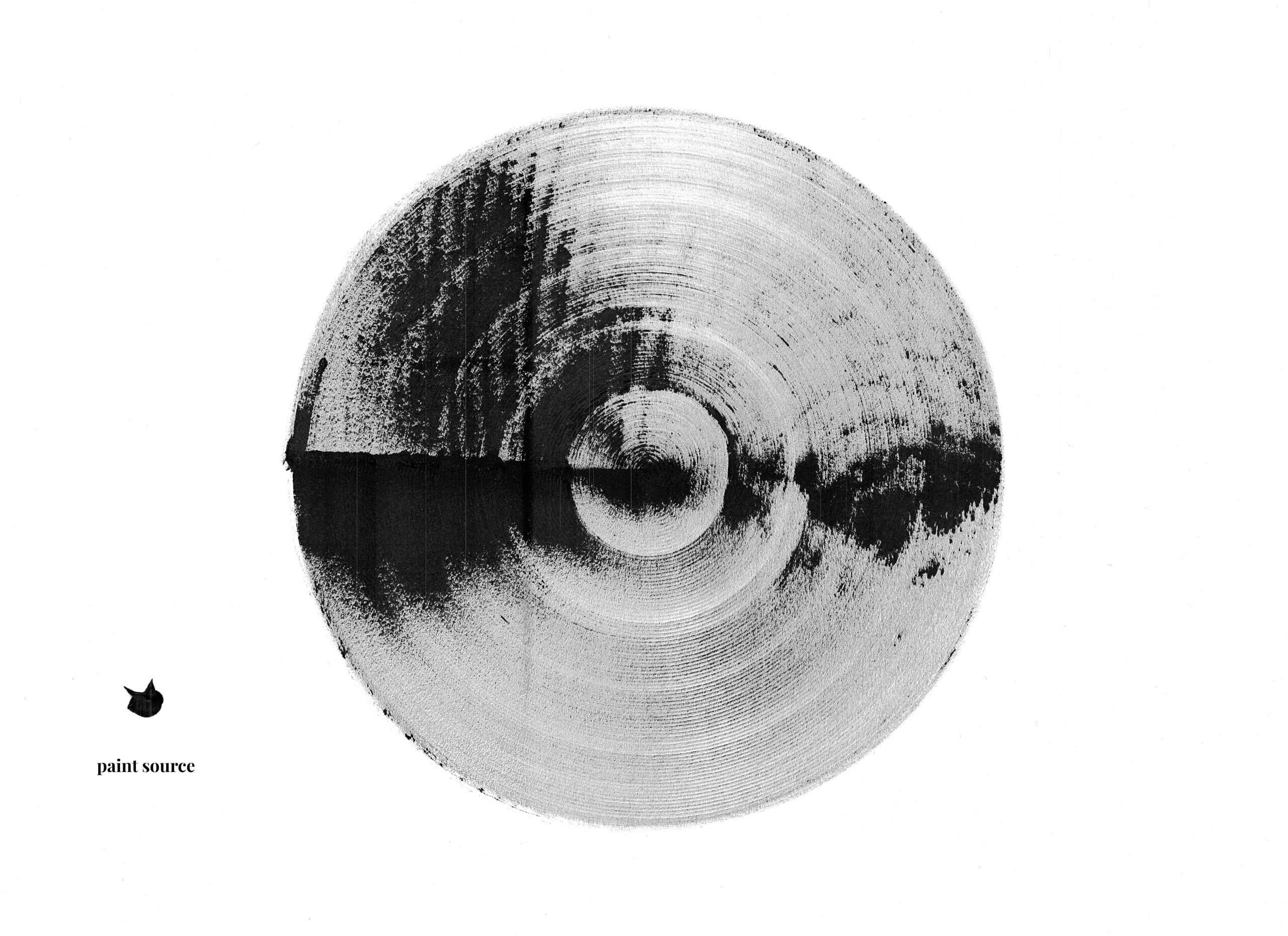
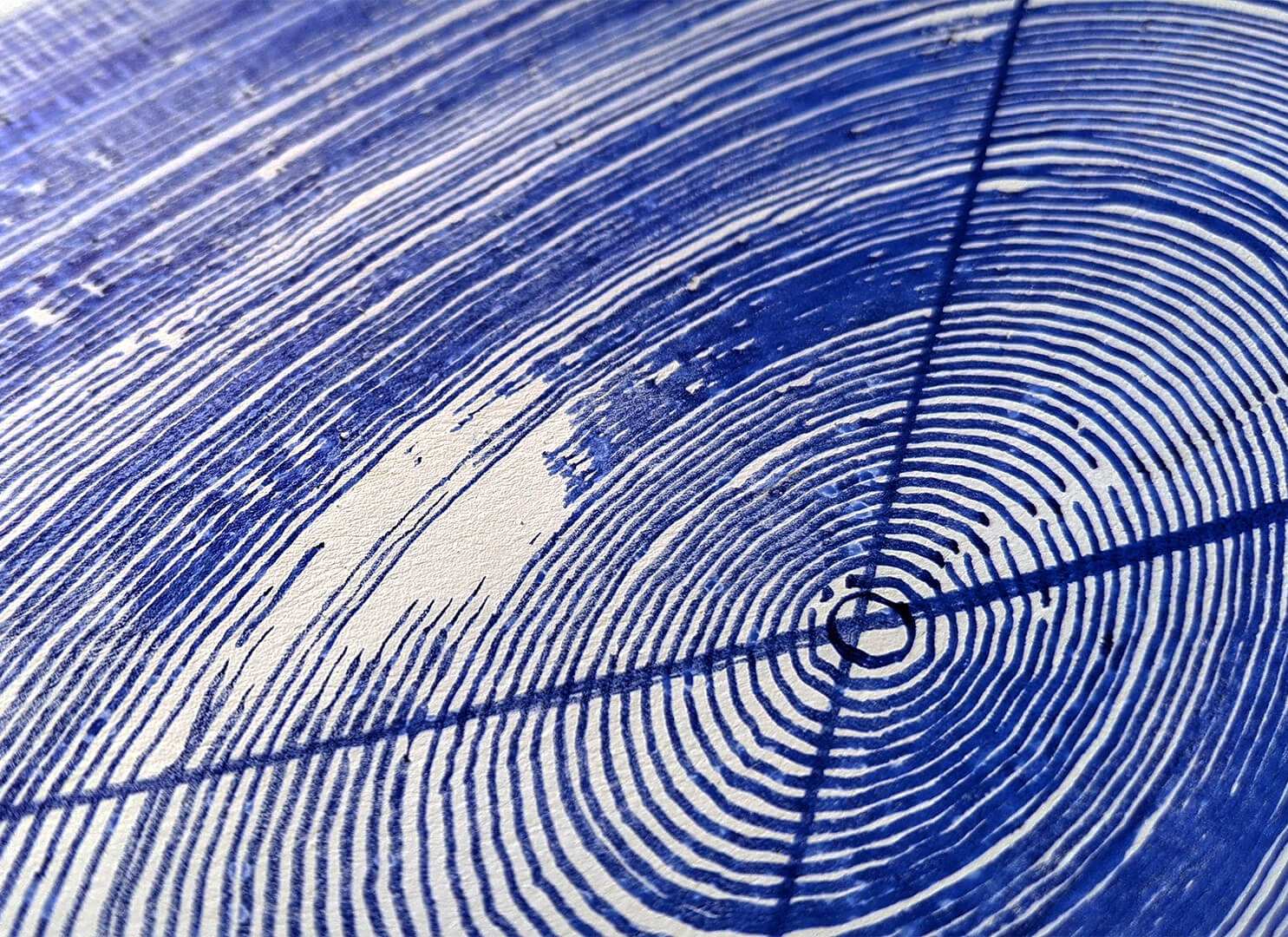
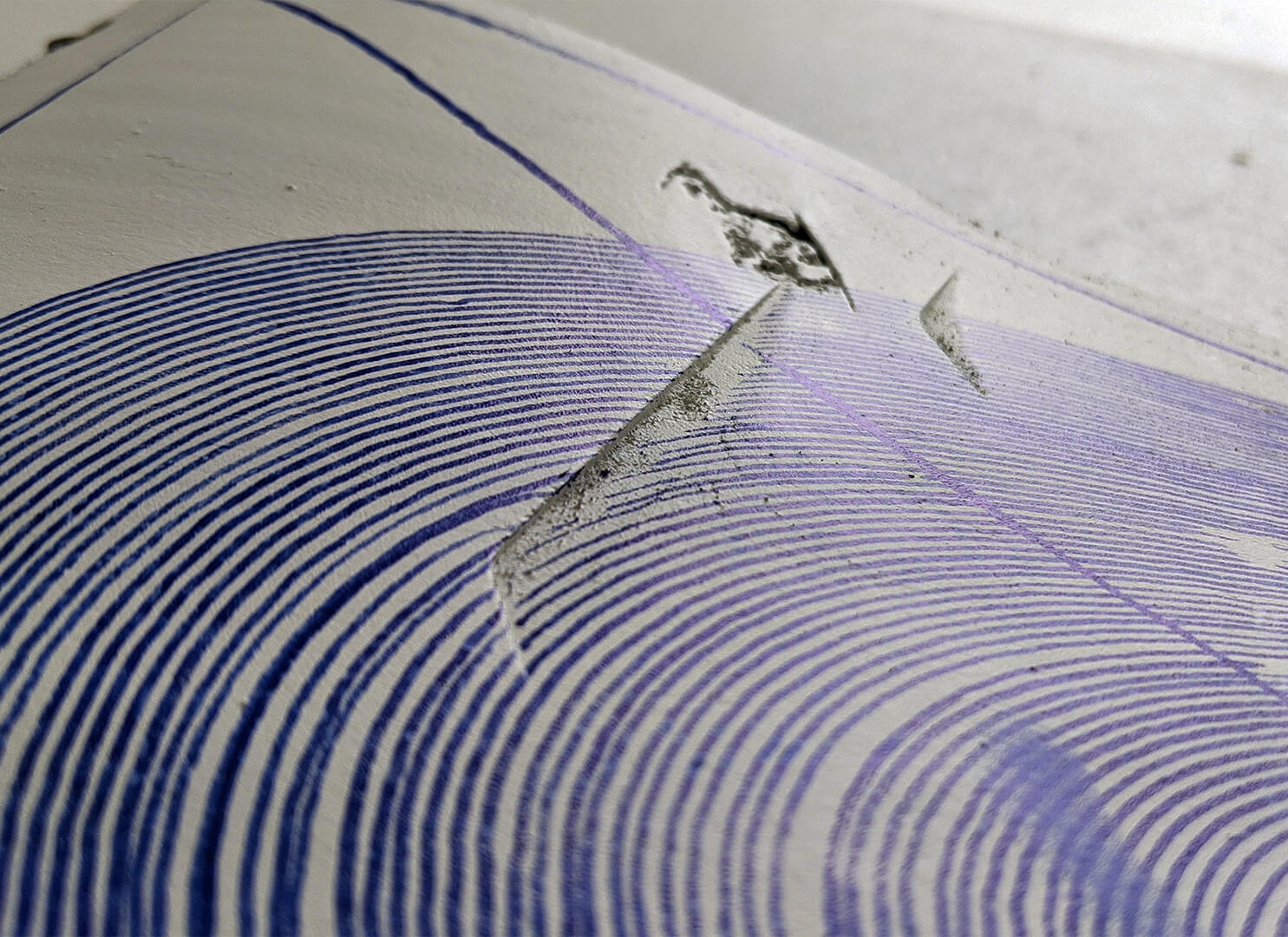
Robotic Painting
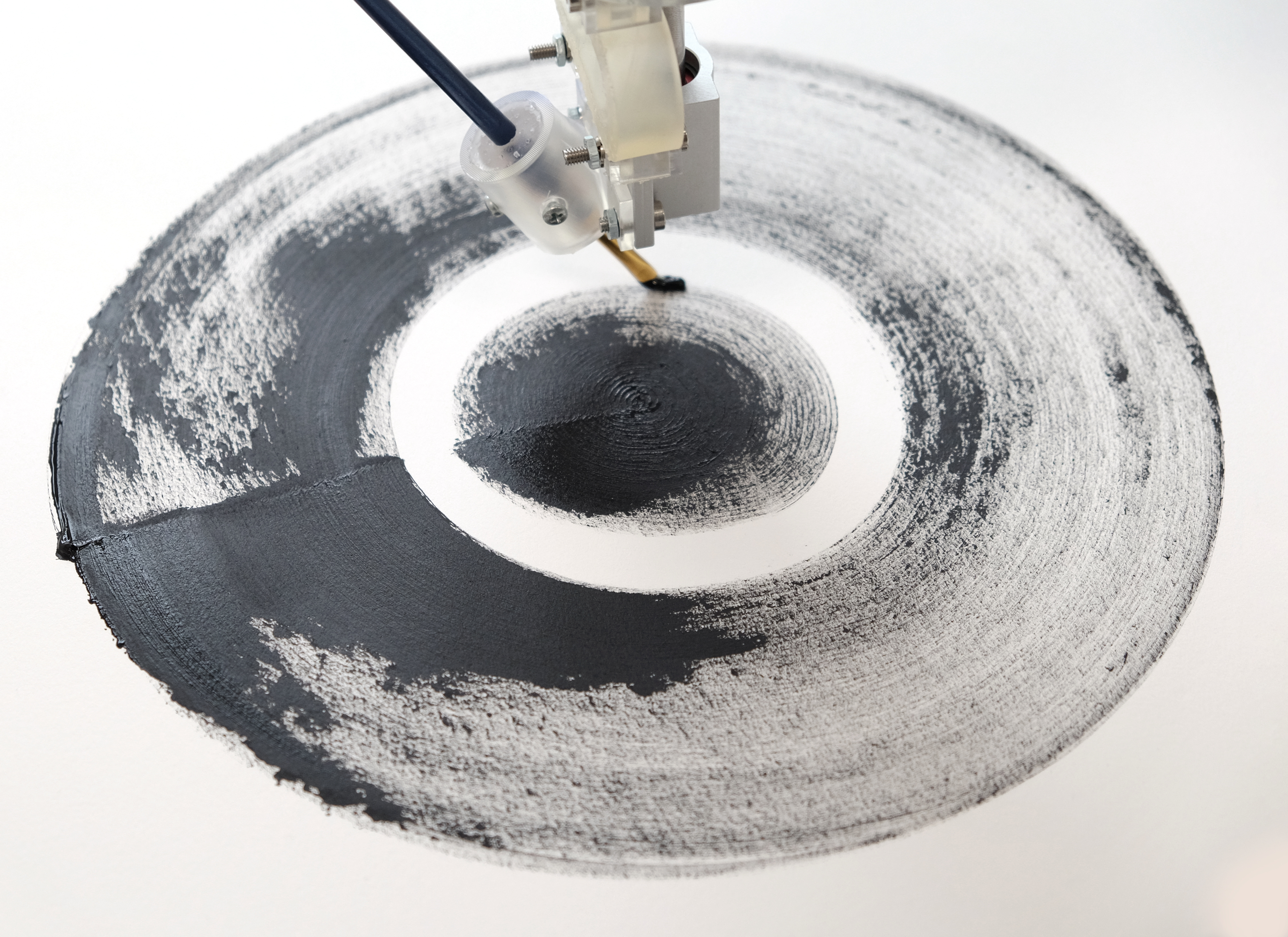
Additional parameters were added to have the robot dip into the paint before every stroke. This series explores the fine precision of using the robot arm mixed with the imprecision of the brush. The same file could be drawn many times with different results every time.


images featured in the charrette
Painting testing to explore how the same program could produce vastly different results just by changing one variable, the paint brush.
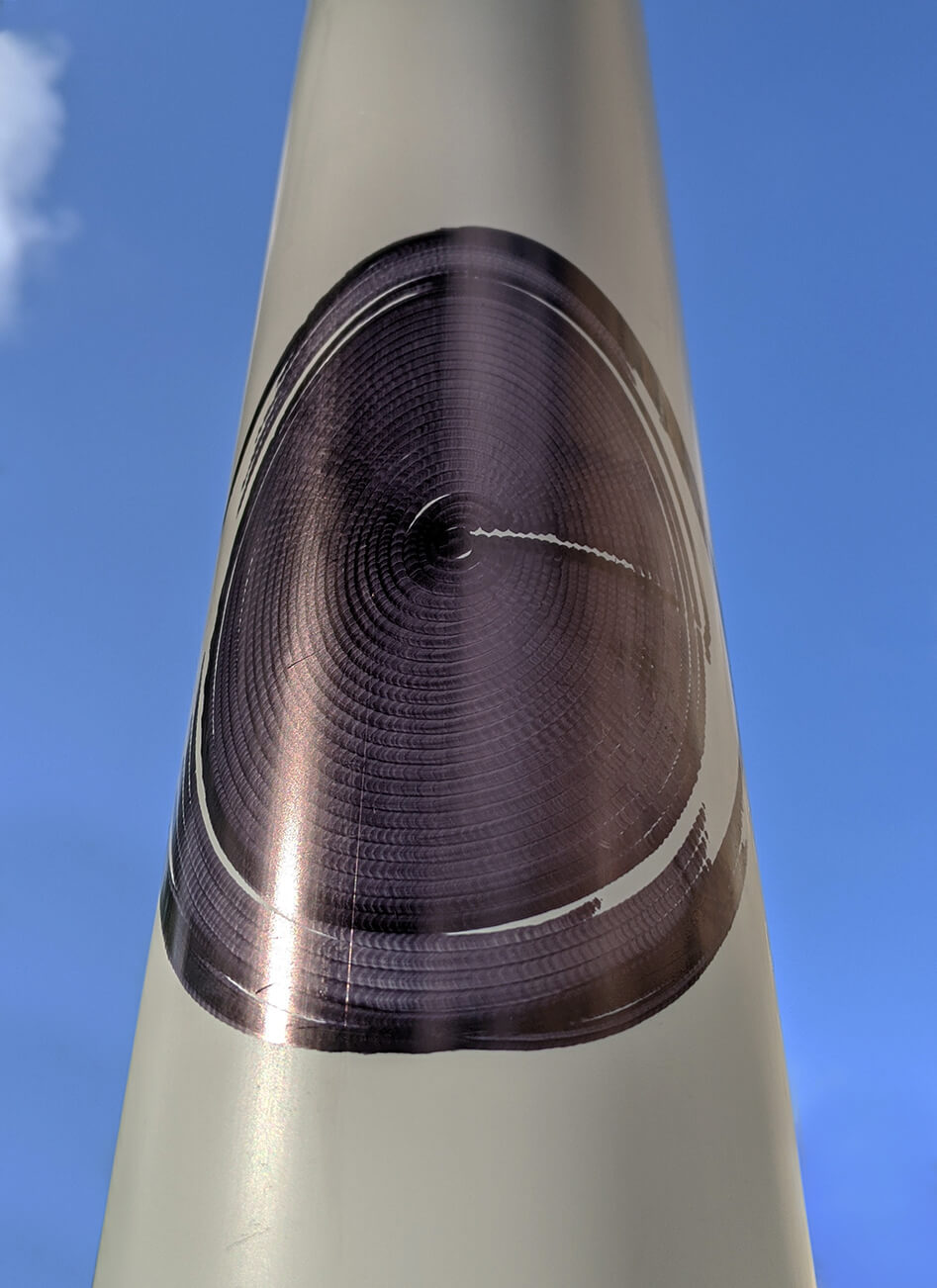
Non-Planar Notation
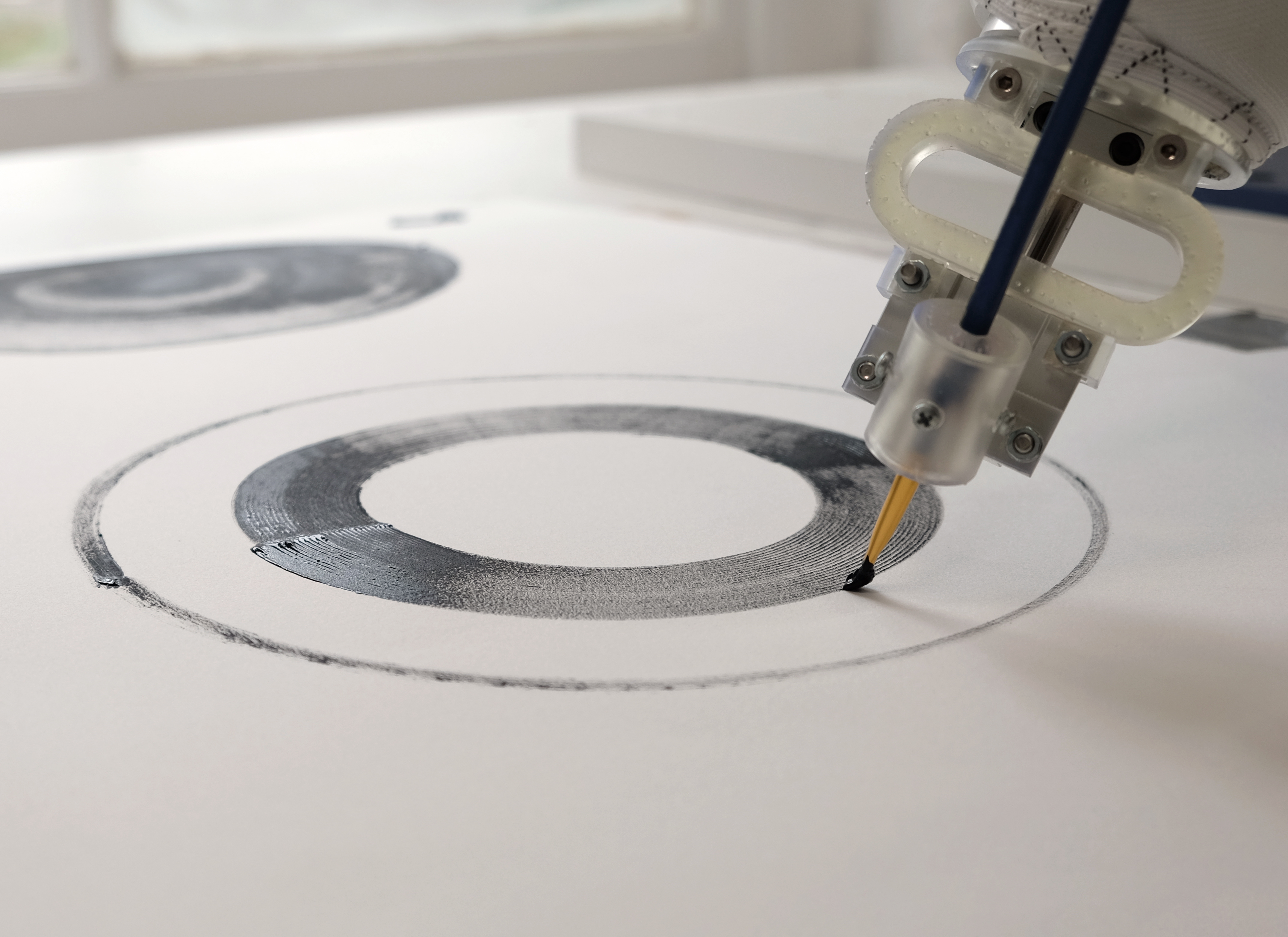
This series explores how to take advantage of the 6-axis arm to draw on curved surfaces. For some of these projects, the 3D scanner was used to produce a base 3D model for the robot to interact with perpendicularly.
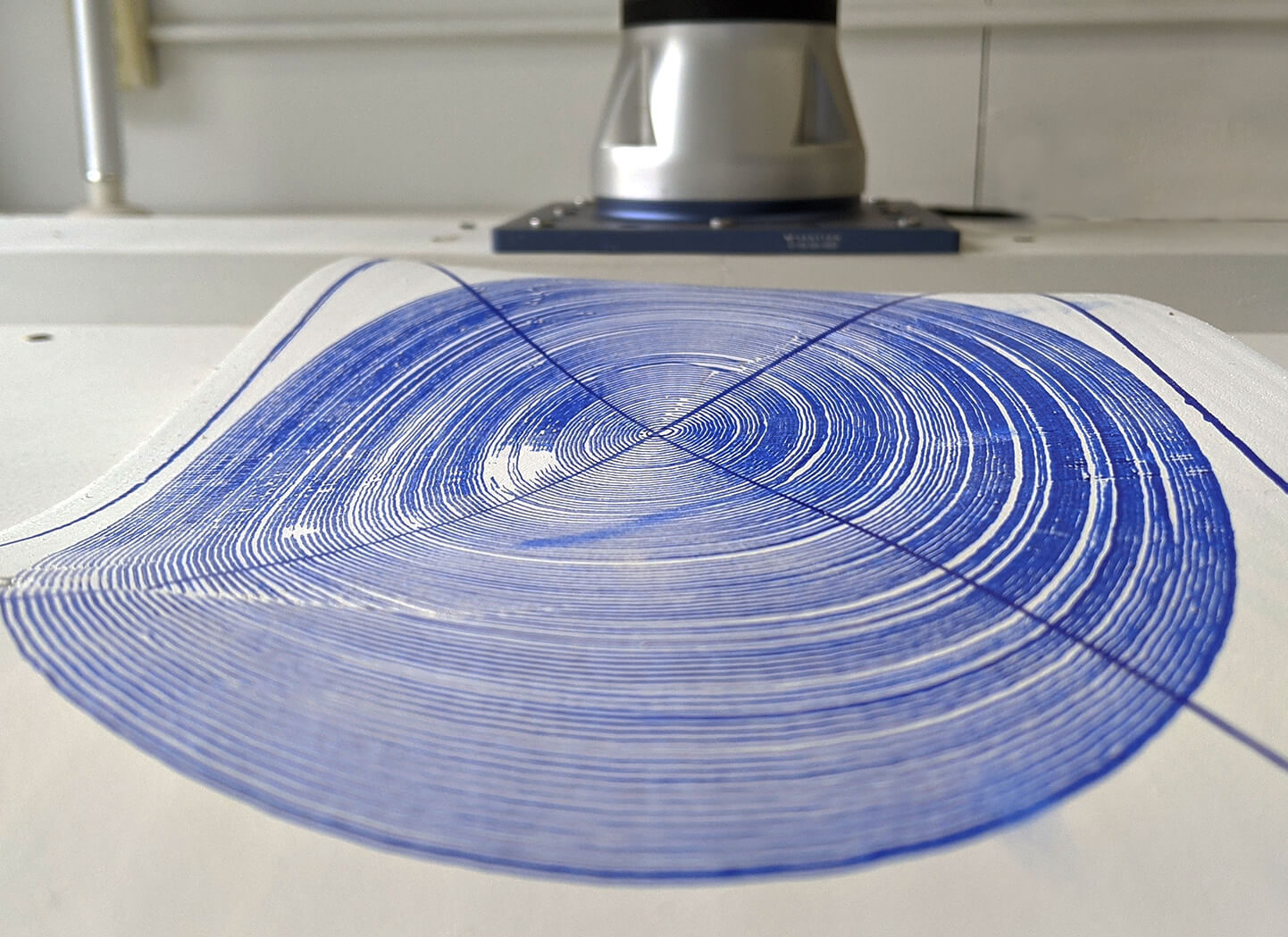
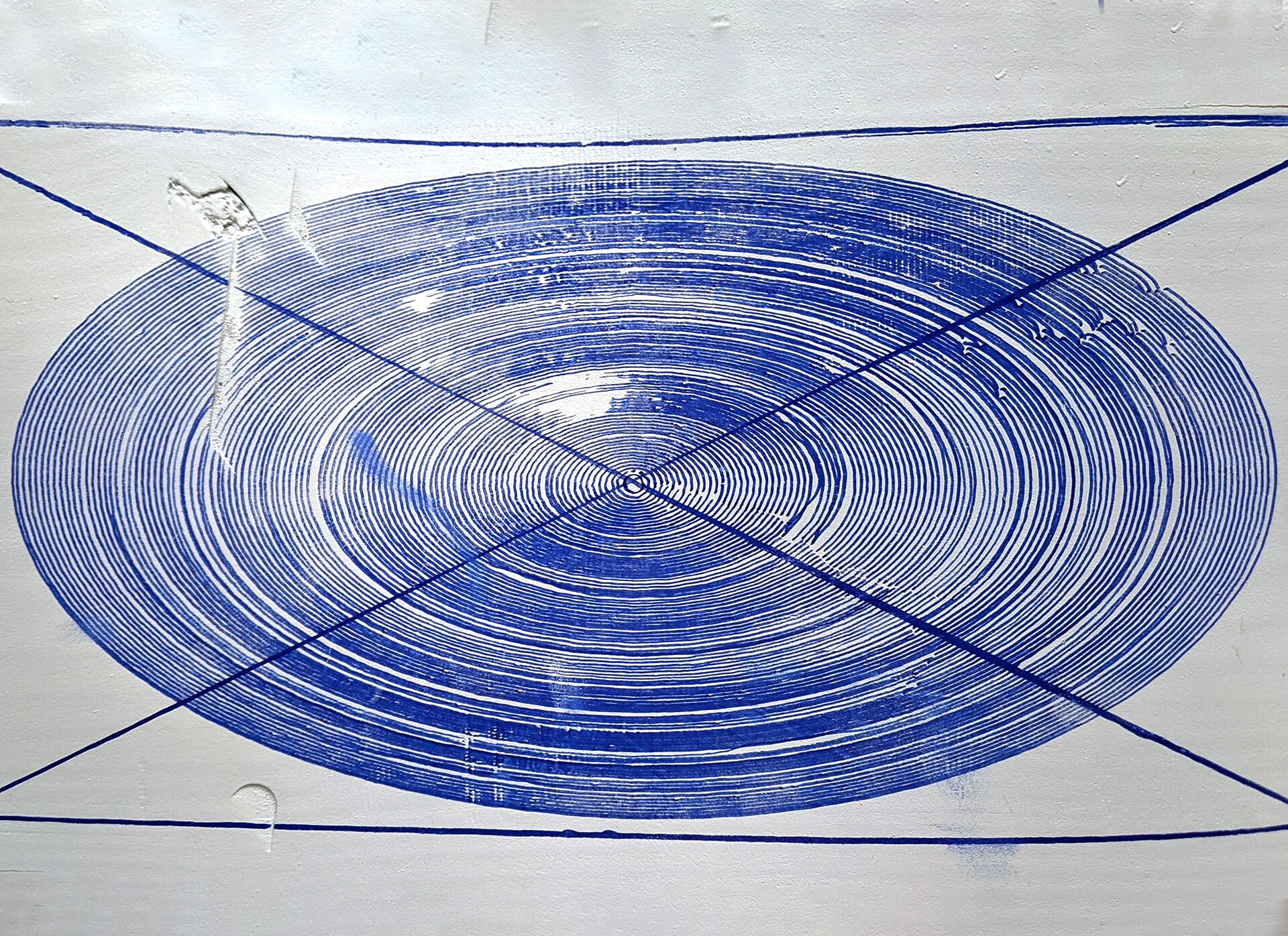
Offset circle drawings on a 4.5" diameter pipe.



not every test can be a success!
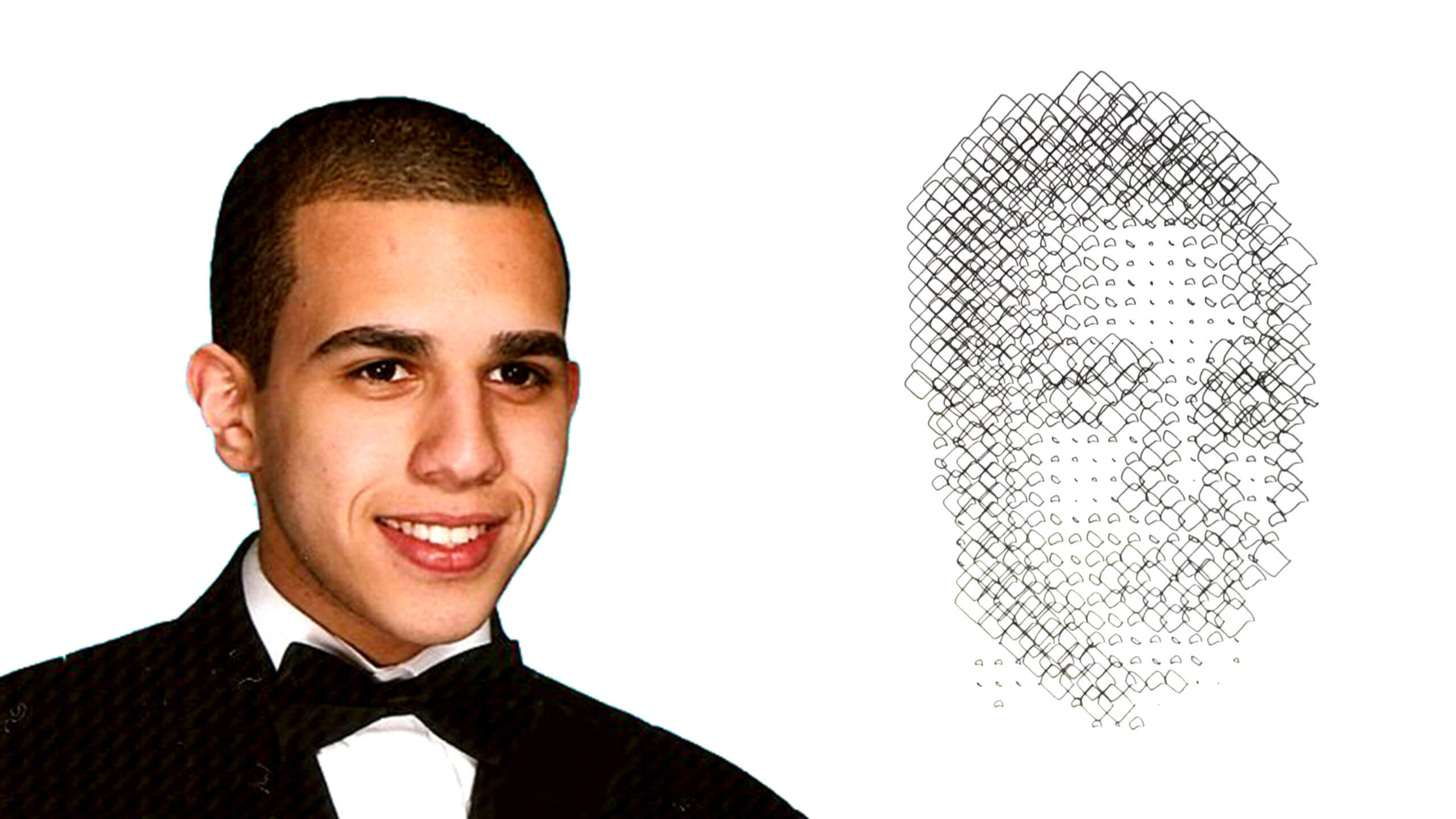
Generative Drawing
Converting images to vector drawings using Grasshopper.
angry wave commercial, the first thing I produced with the robot arm!